
直播课程




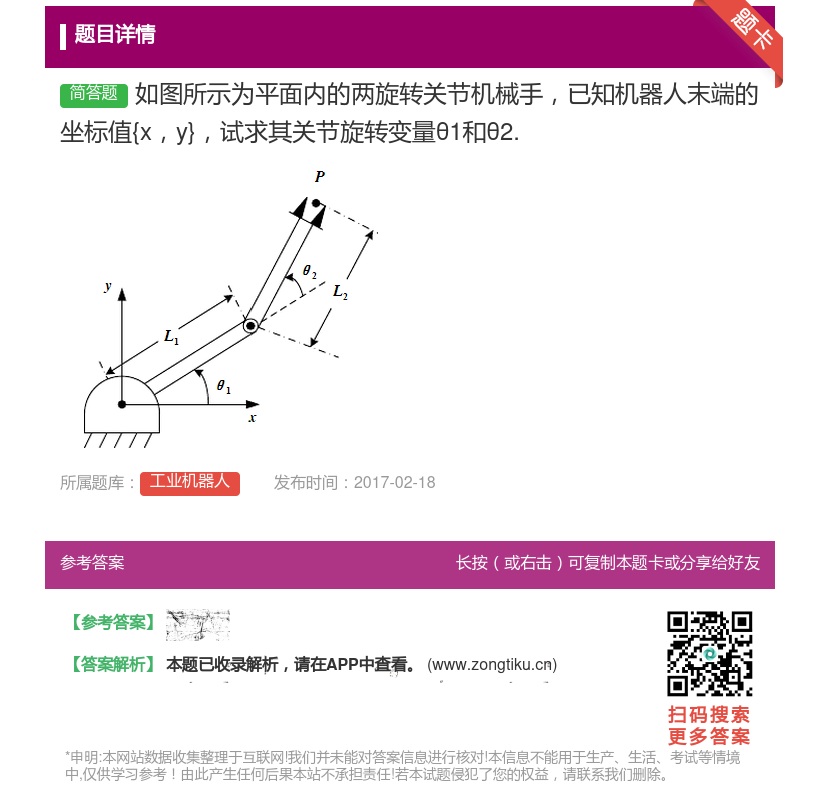
如图所示为平面内的两旋转关节机械手已知机器人末端的坐标值{xy}试求其关节旋转变量θ1和θ2.
来源: 工业机器人
发布时间:2017-02-18
题目机器人的运动学是研究机器人末端执行器和与关节空间之间的关系请注意与下面工业机器人题目有着相似或相关知识点, 6自由度机器人有解析逆解的条件是机器人操作手的独立关节变量多于的运动自由度数; 机器人终端效应器手的力量来自。
如图所示为平面内的两旋转关节机械手已知机器人末端的坐标值{xy}试求其关节旋转变量θ1和θ2.
学习时建议同时掌以下几题,设定关节坐标系时机器人的SLURBT各轴运动。
工业机器人的五种基本坐标式机器人。
机器人关节是如何定义的机器人的两种关节类型是什么。
相同的知识点,可以不同方式出题,建议一起学习掌握。
2024年工业机器人
考试报名审核系统
立即获取审核结果
一级建造师考生必刷题库
历年真题
历年真题
历年真题
历年真题
历年真题
历年真题
